End-to-End CAD Model Retrieval and 9DoF Alignment in 3D Scans
Technical University of Munich
IEEE International Conference on Computer Vision (ICCV 2019)
Abstract
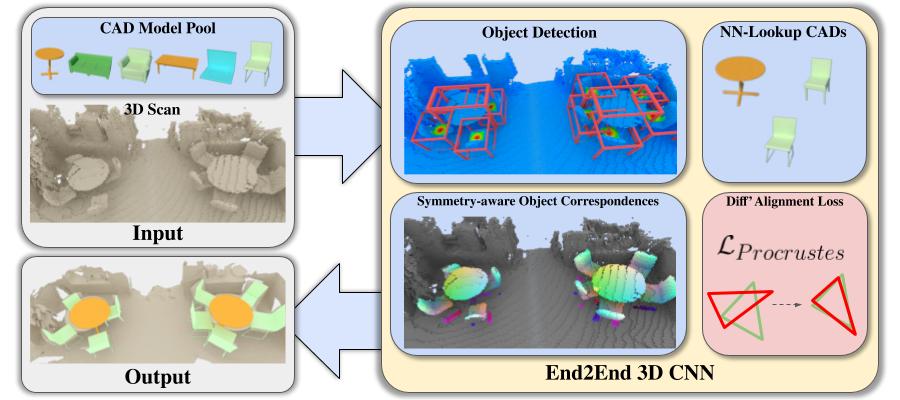
We present a novel, end-to-end approach to align CAD models to an 3D scan of a scene, enabling transformation of a noisy, incomplete 3D scan to a compact, CAD reconstruction with clean, complete object geometry. Our main contribution lies in formulating a differentiable Procrustes alignment that is paired with a symmetry-aware dense object correspondence prediction. To simultaneously align CAD models to all the objects of a scanned scene, our approach detects object locations, then predicts symmetry-aware dense object correspondences between scan and CAD geometry in a unified object space, as well as a nearest neighbor CAD model, both of which are then used to inform a differentiable Procrustes alignment. Our approach operates in a fully-convolutional fashion, enabling alignment of CAD models to the objects of a scan in a single forward pass. This enables our method to outperform state-of-the-art approaches by 19.04% for CAD model alignment to scans, with ≈250× faster runtime than previous data-driven approaches.
 Bibtex
Bibtex